


自主飞行最早起源于固定翼无人机,在消费级无人机崛起后,越来越多的无人机制造厂商与飞控研发机构都在对自动飞行进行不断的研究。随着 RTK 技术的成熟,自主飞技术也取得了长足的进步。目前,越来越多的无人机都运用了自主飞行技术。相比复杂程度更高的遥控器操作,植保无人机更是对自主飞行青睐有加。这与植保无人机的应用场景及培训成本密切相关,可以说是市场的必然选择。

为什么需要自主飞行?消费级无人机的遥杆操作强调手感、乐趣与驾驶的刺激,这与植保无人机的飞行迥然不同。植保无人机一般以规划好的航线飞行为主,若飞手无法对飞行状态精准控制,就很容易出现喷洒不均匀的现象,可能导致大面积的减产,这将给农户带来无法估量的经济损失。为避免这种情况的产生,植保无人机对既定航线的自主飞行有着很高的要求。

另一方面,植保人员有别于航模玩家,无人机是他们工作的工具,而不是一种爱好。能够快速上手,操作简单是多数植保从业人员对植保无人机的需求。这也对植保机的自主飞行有着一定的要求。对于植保队来说,使用遥控器对植保无人机进行操作的培训周期很长,操作也相对复杂,无论是飞防团队还是农户,都需要花费更多的时间与金钱成本。而一台能够实现自主飞行的植保无人机可以大大节省此项成本,为植保队实现增收的目的。自主飞行如何实现?一般来说,各品牌的飞控都会带有自主飞行功能。但是如果在作业过程中,仅仅依靠飞控内的GPS模块进行自主飞行的话,GPS模块可能会受到周围环境的干扰,导致GPS丢星、漂移,无人机的定位就会不够精准,造成作业航线不精确的结果。而如果作业航线漂移,极易出现重喷、漏喷、喷洒不均匀、航线跨度过大或飞行速度过快等情况,导致药害的产生。水稻田中会呈现像“足球场”一样青一条、黄一条的状态,没有喷洒到的区域一目了然,这样的作业效果显然不会被农户所接受。
因此,想要实现植保无人机的全自主飞行作业,大多数人都会选择搭配RTK来使用。通过RTK技术,飞机能够实现厘米级的精准定位,从而大大提升了航线飞行的精度,使得植保作业更加精准、高效。使用RTK技术的植保无人机,一般有以下几个优势:作业定位精度高,数据安全可靠,没有误差积累(一般在基站10公里内,都能达到厘米级精度)。RTK技术的定位精度高,可以降低飞机起降场地的限制。传统GPS植保机需要三名操作人员,包括飞手、安全员和地勤。与GPS植保机不同,使用RTK技术的植保机,在作业时,只需一名操作人员即可完成全套作业,人工成本降低至过去的三分之一。植保无人机从诞生开始,就以“精准喷洒”为口号,直到RTK在植保无人机上的应用,才算是真正开始走上了精准作业的道路。
说了这么多,第一:我们得明白什么是RTK?
RTK(Real - time kinematic)定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
第二:RTK是干什么用的?
RTK(Real - time kinematic)定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
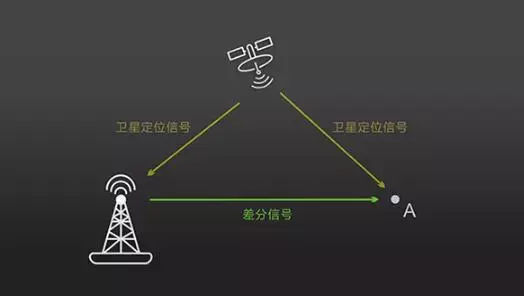
如上图所示,基站与A点的距离比较近,因此他们接收卫星信号时受到的大气层影响也基本接近,基站本身已知所处位置的坐标,在得到卫星信号提供的坐标之后与原数据做新差分,并将差分的结果告知A点,因此A点也可以得到高精度的结果。
第三:RTK对于无人机来说有什么用?
自从RTK带入无人机领域以后,最近一段时间RTK技术在无人机上的应用有点火。在农业植保领域,大家都已经知道它能为无人机提高定位精度,降低飞行误差。
由于卫星信号的多路径效应以及大气中对卫星信号的折射和反射,当农田周边出现防风林或者天气环境影响时,卫星的定位精度就会降低,导致作业中的无人机出现航线偏移。
航线偏移存在一定的风险,在便用普通GPS进行定位,航线偏移的误差甚至可能达到10米左右,如果偏移量太大,将可能导致植保无人机撞上防风林或者其他事故发生。因此这样的自主飞行并不能让人安心,也没有办法真正的解放操作员的双手,操作员仍需要全神贯注地盯着整个作业过程,随时准备救场。
通过下图我们先来了解一下GPS和RTK定位的其中一个特点:
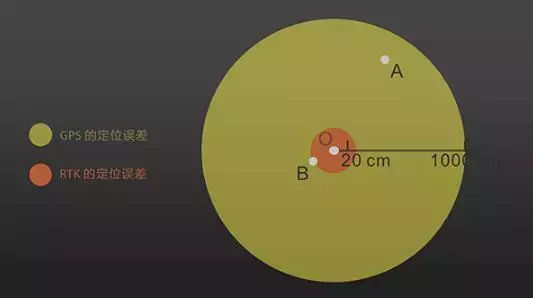
普通GPS的圆概率误差(CEP)有50%左右的概率在2.5米以内,另外50%的误差可能更大,甚至接近10米。上图中,当我们想要寻找O点的位置时,普通的GPS会告诉我们O点在A处,而A则是黄圈直径10米范围内的任意一个点。RTK通过实时差分技术,可以将范围缩小到10cm内。
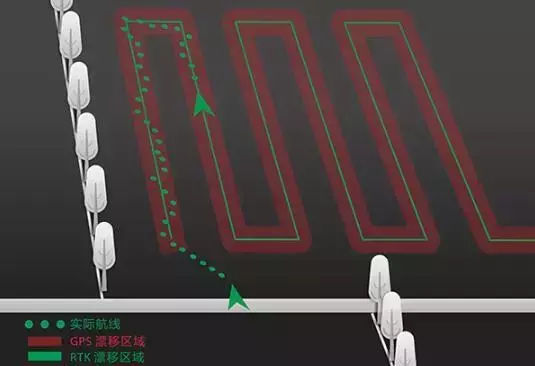
飞机在作业时获取到的航线坐标并不是一条直线,而是一个有宽度的区域,如果使用GPS定位进行航线作业,则区域的宽度在0-10米的范围内,此时飞机实际飞行的轨迹将会是一条歪歪扭扭的曲线,并且每一次飞行的曲线都不一致。
而使用RTK技术时,航线将是一个0-10厘米宽度的区域,与GPS相比,RTK基本等于是直线飞行,弯曲的幅度很小,因此效果将更均匀可控。
植保无人机:在一些垄间距较大的田间作业时,如发生的偏移较大,甚至可能产生作物本身大部分漏喷和土地污染等次生危害,总而言之,RTK通过大幅提高定位精度来拓宽GPS定位技术的应用场景。在未来的农田里,RTK也会有更多产生作用的地方。它将融入作物生长的每一个阶段,帮助我们实时获取农田中任意位置的时间和空间信息,再搭配对应的设备,实现定时、定点、定量的农药化肥投放,取得最佳的经济效益和环境效益。除了植保作业外,高精度的实时定位还可以协助农村土地测量、确权和提供其他农田中的无人自动化设备高精度导航与数据服务。
第四:在植保无人机上使用RTK技术存在哪些问题?
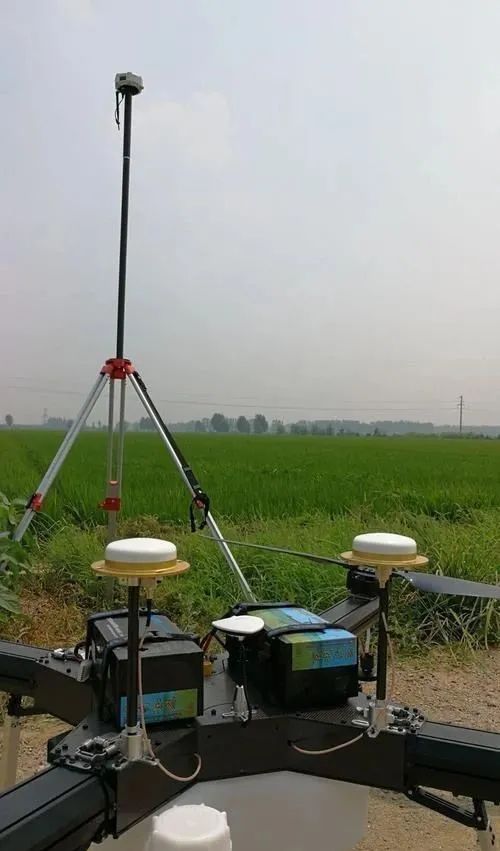
1、基站的设置及作业半径对RTK 的测量精度和作业速度有直接影响。基准站应尽量架设在地势较高的地方,而且要远离强电磁干扰源和大面积的信号反射物。
2、RTK技术的本身,是依赖于GPS卫星定位的,它的使用要有四颗以上卫星相位观测值的跟踪和必要的几何图形,如果所在地本身接受GPS的信号就很差,那RTK也没有什么作用。另外在有大面积的信号反射物的地方是无法定位的,如高层建筑附近,茂密的森林等;强电磁源也会干扰信号,如高压输电线附近,变电站等,在云层较厚的时候也有影响。
责任编辑:宋新华
